Innovation Hub Tour Robot
Overview
The Mines Innovation Hub is projected to serve in part as an exhibition of some of the most exciting new innovations coming from School of Mines. Continuing in that theme, it seems fitting that the tour guide be innovative as well. The team was asked to produce an autonomous robot that would guide visitors on a tour of the soon to be constructed Mines Innovation Hub. This robotic tour guide will greet greet visitors and guide them in a tour of the building while stopping at points of interest along the way to give brief descriptions. The robot should interact with the visitors while avoiding obstacles along a predetermined tour route and then return to its base.
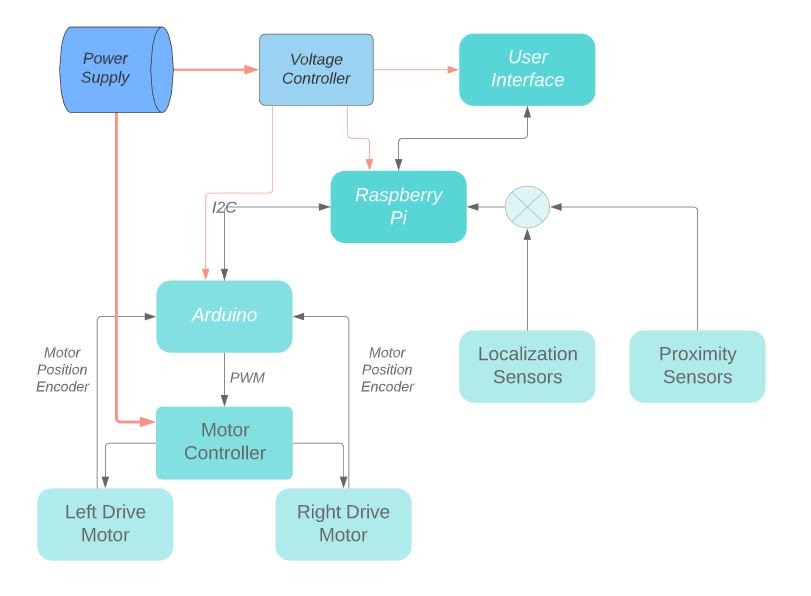
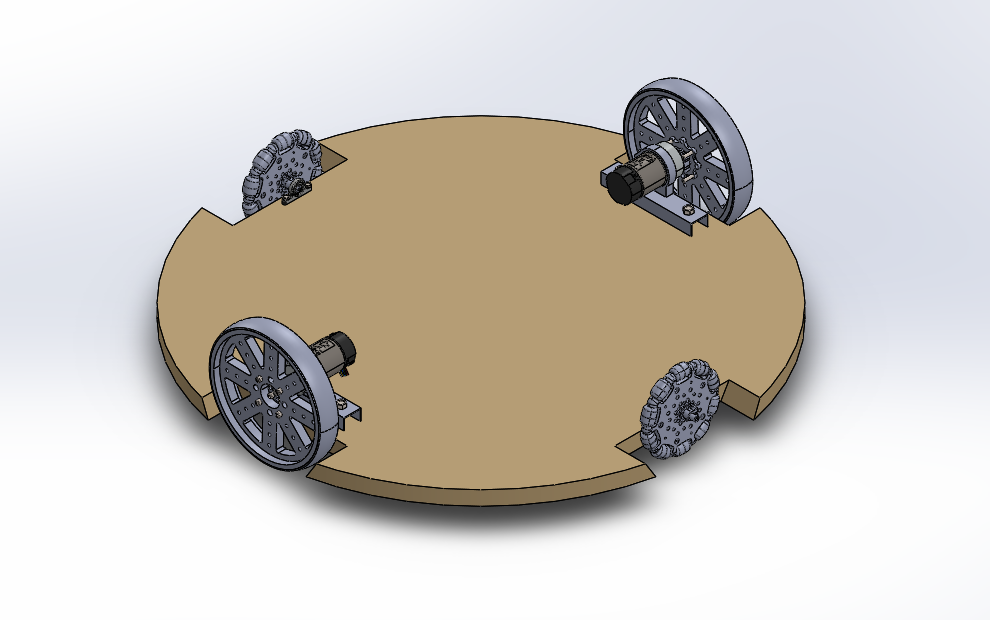
The team chose a dome-based design with an upright post supporting a touchscreen tablet. The robot sits on two opposing drive wheels and two free spinning “omni-wheels”. The mobilization and localization systems are controlled through an Arduino micro computer and the user interface is powered by a Raspberry Pi, a small single-board computer.
The localization system, the system that tells the robot where it is in the building, is an off-the-shelf interior “GPS” system. The system utilizes a “hedgehog” sensor on the robot that transmits and receives signals from several “beacon” sensors mounted on the walls in the robots operating area. Similar to GPS on a smartphone, the robot can determine its position through some simple calculations given it’s position relative to three or more beacons.
This will be the first robot of its kind at Mines and should serve to wow visitors and demonstrate the abilities of Mines students.

Live Zoom Chat
Use the link below to join us live from 8:00 – 10:30 a.m. on December 3.
Join from PC, Mac, Linux, iOS or Android: https://mines.zoom.us/j/7543106575?pwd=NjlYYWdjdVM1aExydzNwQ1lyODRaQT09
Password: 974007
Or iPhone one-tap: 16699006833,7543106575# or 12532158782,7543106575#
Or Telephone:
Dial: +1 669 900 6833 (US Toll) or +1 253 215 8782 (US Toll)
Meeting ID: 754 310 6575
Password: 974007
International numbers available: https://mines.zoom.us/u/aiiyquUpu
Or a H.323/SIP room system:
H.323: 162.255.37.11 (US West) or 162.255.36.11 (US East)
Meeting ID: 754 310 6575
Password: 974007
SIP: 7543106575@zoomcrc.com
Password: 974007
Team Members
- Mason Brainard
- Dylan Hird
- Eryk Lorenz
- Stephen Mancuso
- Chad Rogers
The Client
- Colorado School of Mines – Professor John Persichetti
Acknowledgements
Project Advisor: Dr. Yosef Allam
Technical Advisor: Darren McSweeney
Video
Elevator Pitch
 The Innovation Hub Tour Robot team is proud to share with you our solution for a robotic tour guide. The team consists of three Electrical Engineering majors and two Mechanical Engineering majors. We have leveraged all that we have learned from our time at Mines to design a robot that meets all of our clients needs for this semester. We are confident that future teams will be pleased to build off of the work we have done to ultimately offer the Mines community and guests an incredible tour experience curated by an interactive robot like nonother.
The Innovation Hub Tour Robot team is proud to share with you our solution for a robotic tour guide. The team consists of three Electrical Engineering majors and two Mechanical Engineering majors. We have leveraged all that we have learned from our time at Mines to design a robot that meets all of our clients needs for this semester. We are confident that future teams will be pleased to build off of the work we have done to ultimately offer the Mines community and guests an incredible tour experience curated by an interactive robot like nonother.




Design Approach
Our design methodology included a first principles approach to solving the problem by first understanding what other solutions looked like and understanding their advantages so we can build ours to include those. In our research, we discovered many robots existed but few for our use case (a tour robot). Speaking with stakeholders was a critical step to our design methodology as we wanted to make something that people wanted to use and that wasn’t a nuisance or fell out of regulatory standards for buildings. Designing iteratively while gathering stakeholder feedback each step along the way allowed us to avoid potential “deadends”.
The team employed a number design tools including software such as Solidworks and other CAD software to not only serve as documentation, but conduct analysis on the mechanical components of the robot, get an idea of the aesthetics of a potential future product, and get feedback on the various aesthetic concepts. Matlab was used to simulate the forces required to tip the robot over at different weights while still complying with ADA standards, allowing us to better plan out the user interface for the sake of future teams. CAD software was also used to analyze stresses on the post. Using CAD allowed us to skip design iterations that would otherwise have taken time to construct and test.
The team also made use of a number of project management techniques to keep the team on track including Gantt charts, Trello, and critical path analysis to highlight which subsystems might be the limiting factor for meeting the deadline given the dependencies of subsystems on each other. From a technical standpoint the team used flowcharts to get a big picture understanding of the lower level and higher level system architecture. These flow charts helped us to determine the necessary hardware and software, the interface between the hardware and software, and how to logically divide the system into separately testable subsystems on which we can develop in parallel, avoiding the “waterfall” style of execution. This allowed us to vastly expedite development.
Design Solution
The Innovation Hub is a planned building on campus that will create workshops and collaboration space for prototyping. It will also contain some classrooms. Construction is set to begin in the early part of 2021 and will be complete by the spring of 2022. It is part of Mines’ focus to develop places on campus for entrepreneurship to thrive. The previous team’s Senior Design project was to create exhibits that show the evolution of innovation. One of those exhibits, which represents the future of engineering, was an autonomous tour robot.
The robot, an idea which was passed along from a previous team, should interact with visitors while avoiding obstacles along a predetermined tour route and then return to its base. It should be able to greet visitors at the door and describe different points of interest as it guides visitors in a tour. The robot is not only intended to serve as a tour guide, but as an exhibit in and of itself and should therefore be aesthetically pleasing and conform to museum exhibit guidelines including factors such as ADA compliance, ease of use, and durability. Using information from our meeting with Christine Leahy, our museum consultant, the team came up with a few broad aesthetic concepts for consideration to be reviewed in the design and build process.
The design process incorporated knowledge passed on from the previous team in addition to the research, interviews, and surveys we conducted. The principal findings in all of our research was that the robot must be able to give a tour to visitors of various Mines original innovations, inventions and creations (InnoHub) while being an innovation in its own right, and simultaneously be friendly and inviting, simple and easy to use, low maintenance, low noise, durable, able to handle indoor obstacles, and able to deter abuse and misuse. Given these constraints, all our design choices revolved around balancing each of these.
The team’s solution to localization is an off the shelf interior “GPS” system by a company called Marvelmind. This system works similarly to a global positioning system but rather than determining its position by ranging satellites it does it by ranging to beacons placed inside the building.
The current system configuration consists of a beacon located on the robot called a hedgehog and 3 beacons in fixed positions about the building. If the hedgehog has direct line of site to the fixed beacons, it can determine the robot’s position to plus or minus 2 centimeters by calculating its range to each fixed beacon. The robot hedgehog uses sonic pulses to determine the range between it and the fixed beacons.
The localization data is routed from the hedgehog to the system Arduino as an input to the mobilization system.
Moving forward, future teams should build on all the knowledge we gained (all of which is in the Final Design Report), and should design the software, obstacle avoidance system, computer vision, voice recognition, iPad application, and exhibit destinations to meet the design criteria listed earlier, as well as research and discover any constraints that are unique to those items, which were not part of the scope of this year’s project.
Next Steps
There are three modules of the robot to refine or complete. These include the user interface, GPS integration with the building, and collision avoidance. These improvements fall outside the scope of the current project. We included these considerations in the design in hopes that backwards compatibility for future iterations of the robot would be as simple as possible. Part of this goal included research and stakeholder feedback for the user interface. The team considered a few user interface options and factors such as ADA compliance, stakeholder feedback from the prototype, and advice from one of our consultants Christine Leahy, arrived at the conclusion that an elevated tablet as seen in the CAD rendering would be the best recommendation for future teams.
Although we have already integrated a GPS localization system, due to the lack of a physical building and uncertainty in the final layout of the building, we have not been able to adapt the GPS system to a potential final tour path. This will require a future team to purchase more GPS transmitters, place the transmitters in the building, and code a path into the mobilization code. We researched collision avoidance solutions to provide a recommendation to future teams.
Meet the Team
Mason Brainard

Dylan Hird
 Dylan Hird, originally from Fort Collins Colorado, is a senior in the Electrical Engineering program at Colorado School of Mines. He previously interned Patroness llc where he worked on collision avoidance and now hopes to make a career in coding and automation.
Dylan Hird, originally from Fort Collins Colorado, is a senior in the Electrical Engineering program at Colorado School of Mines. He previously interned Patroness llc where he worked on collision avoidance and now hopes to make a career in coding and automation.
Eryk Lorenz
 Eryk Lorenz is completing his B.S. in Mechanical Engineering and an intern at the Army Corps of Engineers. He is currently in the process of finding a job after graduation. He is looking forward to applying what he has learned at the Colorado School of Mines in the aerospace industry and hopes to focus on propulsion systems.
Eryk Lorenz is completing his B.S. in Mechanical Engineering and an intern at the Army Corps of Engineers. He is currently in the process of finding a job after graduation. He is looking forward to applying what he has learned at the Colorado School of Mines in the aerospace industry and hopes to focus on propulsion systems.
Stephen Mancuso
 Stephen Mancuso is a Mechanical Engineering major. He is dedicated to learning continuously and is excited to find a career in sustainable energy to apply the skills and knowledge he has learned at the Colorado School of Mines towards improving the world and having a fulfilling career.
Stephen Mancuso is a Mechanical Engineering major. He is dedicated to learning continuously and is excited to find a career in sustainable energy to apply the skills and knowledge he has learned at the Colorado School of Mines towards improving the world and having a fulfilling career.
Stephen is native to Colorado and grew up in Aurora. He is getting married this January and is excited to start this new season of life.
Chad Rogers
 Chad Rogers is a Electrical Engineering major and an intern at High Precision Devices Inc. in Boulder, CO where he has accepted an offer for a post-graduation position as a field applications engineer. He is looking forward to applying what he has learned at the Colorado School of Mines in his future career in cryogenic semiconductor testing.
Chad Rogers is a Electrical Engineering major and an intern at High Precision Devices Inc. in Boulder, CO where he has accepted an offer for a post-graduation position as a field applications engineer. He is looking forward to applying what he has learned at the Colorado School of Mines in his future career in cryogenic semiconductor testing.
Chad is originally from Kansas. He is a veteran of the US Navy submarine service and served for five years aboard the USS San Francisco and the USS Louisiana. He and his wife live in Boulder, CO.